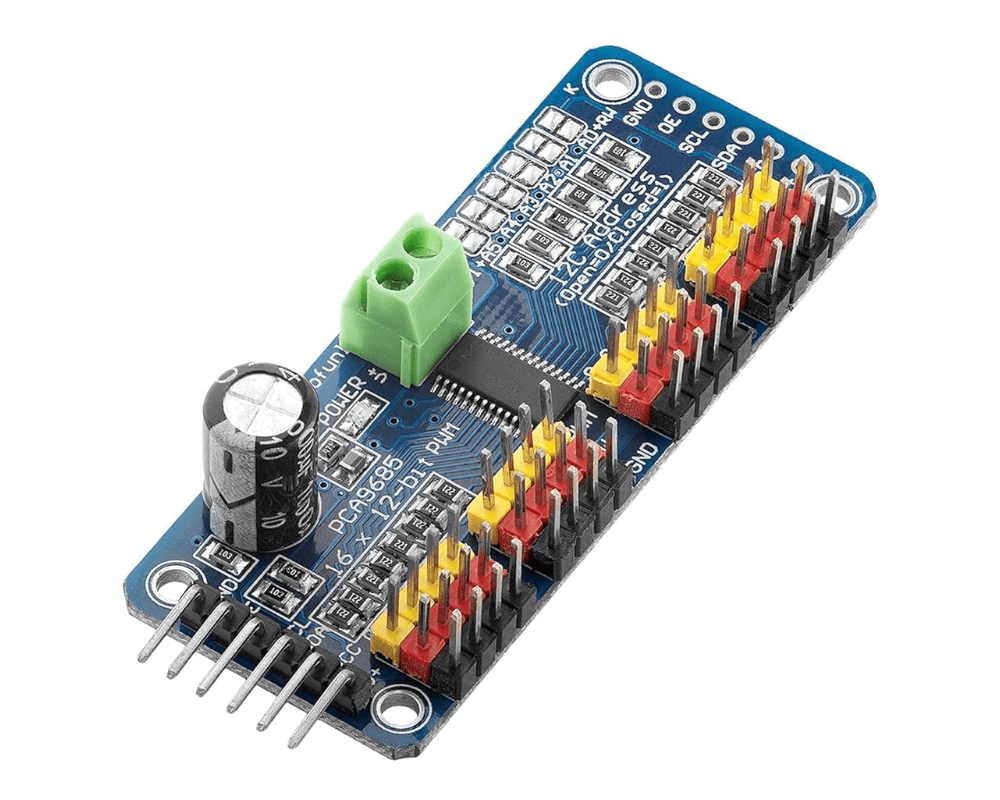
Driver para motores PCA9685 I2C de 16 Canales 12-bit PWM
Utiliza la comunicación I2C para controlar hasta 16 servomotores con una resolución de 12 bits.Precio por Unidad Actual:
El PCA9685 es un controlador de servomotores que utiliza la comunicación I2C para controlar hasta 16 servomotores con una resolución de 12 bits. Este dispositivo es ampliamente utilizado en aplicaciones donde se requiere control preciso y suave de servomotores, como en robótica, modelismo y sistemas de automatización. El PCA9685 permite ajustar la frecuencia de modulación por ancho de pulso (PWM) para cada canal de servo de forma independiente, lo que proporciona una gran flexibilidad en el control de los movimientos de los servomotores.
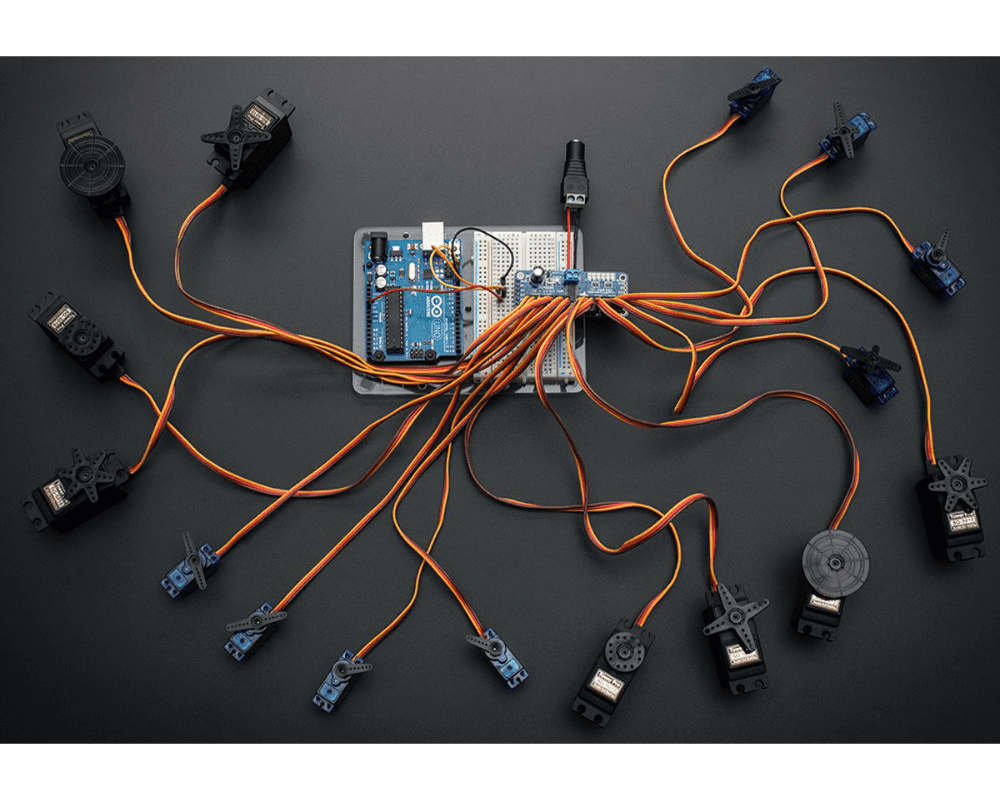
- Control preciso de hasta 16 servomotores con una resolución de 12 bits.
- Interfaz I2C que facilita la comunicación con microcontroladores y otros dispositivos.
- Frecuencia de PWM ajustable para cada canal de servo de forma independiente.
- Capacidad de apagar y encender cada canal individualmente, lo que permite un control más eficiente de la energía.
- Diseño compacto y fácil de integrar en diferentes aplicaciones gracias a su tamaño reducido y su compatibilidad con el protocolo I2C.